Additional examples
[1]:
import ivim
import os
import tempfile
import numpy as np
import matplotlib.pyplot as plt
# Define output folder (can be any valid folder)
folder = os.path.join(tempfile.gettempdir(),'ivim_example')
if not os.path.exists(folder):
os.mkdir(folder)
Comparison of model fitting algorithms
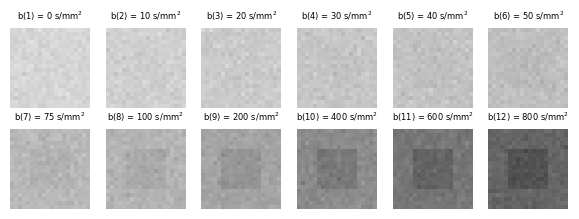
Start by generating synthetic data
[2]:
b = [0,10,20,30,40,50,75,100,200,400,600,800]
bval_file = os.path.join(folder,'example.bval')
ivim.io.base.write_bval(bval_file, b)
D = [0.8e-3, 1.0e-3]
f = [0.1, 0.15]
Dstar = [20e-3, 15e-3]
regime = ivim.models.DIFFUSIVE_REGIME
sz = [20,20,10]
pars = ['D','f','Dstar']
files_sim = {}
for par, vals in zip(pars, [D, f, Dstar]):
im = vals[0] * np.ones(sz)
im[sz[0]//4:3*sz[0]//4,sz[1]//4:3*sz[1]//4,:] = vals[1]
files_sim[par] = os.path.join(folder, f'sim_{par}.nii.gz')
ivim.io.base.write_im(files_sim[par], im)
noise_sigma = 1/40 # SNR = 40, given S0 = 1 as default
outbase_sim = os.path.join(folder,'ivim_sim')
ivim.sim.noise(files_sim['D'], files_sim['f'], regime, bval_file, noise_sigma, outbase_sim, Dstar_file = files_sim['Dstar'])
im_file = outbase_sim + '.nii.gz'
[3]:
im = ivim.io.base.read_im(im_file)
fig,axes = plt.subplots(len(b)//6,6,figsize=(6*1.2,len(b)//6*1.2))
for i,ax in enumerate(axes.flatten()):
ax.imshow(im[...,0,i], cmap='gray', vmin=0, vmax=1.2)
ax.axis('off')
ax.set_title(f'b({i+1}) = {int(b[i]):d} s/mm$^2$', fontsize = 6)
Apply model fitting algorithms
[4]:
outbase_nlls = os.path.join(folder,'nlls')
ivim.fit.nlls(im_file, bval_file, regime, outbase=outbase_nlls)
outbase_seg = os.path.join(folder,'seg')
bthr = 200
ivim.fit.seg(im_file, bval_file, regime, bthr, outbase=outbase_seg)
outbase_bayes = os.path.join(folder,'bayes')
ivim.fit.bayes(im_file, bval_file, regime, outbase=outbase_bayes)
outbase_bayessp = os.path.join(folder,'bayes_sp')
mask_file = os.path.join(folder,'mask.nii.gz')
ivim.io.base.write_im(mask_file,np.ones(sz),imref_file=im_file)
ivim.fit.bayes(im_file, bval_file, regime, outbase=outbase_bayessp, spatial_prior=True, roi_file=mask_file)
/home/oscar/programming/ivim/ivim/fit.py:536: RuntimeWarning: overflow encountered in square
ssq_new = np.sum((Y[mask, :] - fn(X, thetanew))**2, axis=1)
/home/oscar/programming/ivim/ivim/models.py:29: RuntimeWarning: overflow encountered in exp
S = np.exp(-np.outer(D, b))
/home/oscar/programming/ivim/ivim/fit.py:539: RuntimeWarning: overflow encountered in divide
post_ratio[nonzero] = ((ssq_new[nonzero] / ssq_old[nonzero])**(-X.shape[0]/2)
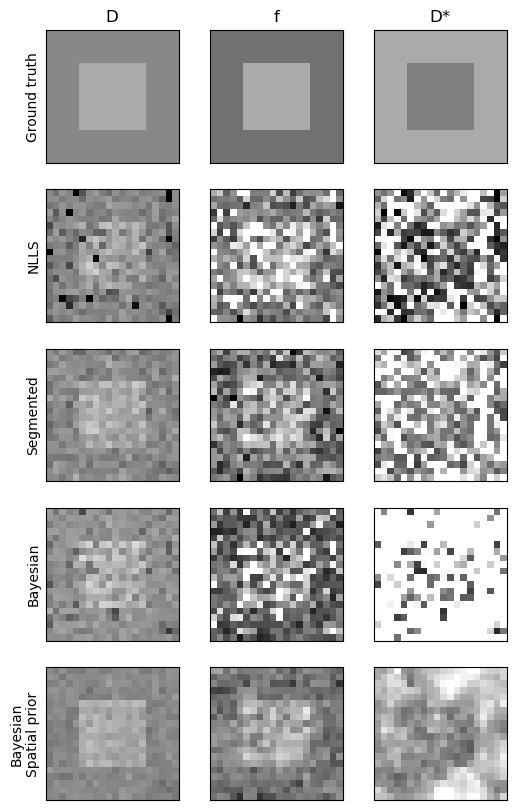
Display parameter maps
[5]:
fig,axes = plt.subplots(5,3,figsize=(3*2,5*2))
for par,plotpar,axs in zip(pars,['D*' if par == 'Dstar' else par for par in pars],axes.T):
maps = [ivim.io.base.read_im(files_sim[par])]
for outbase in [outbase_nlls, outbase_seg, outbase_bayes, outbase_bayessp]:
maps += [ivim.io.base.read_im(outbase+f'_{par}.nii.gz')]
for im,ax in zip(maps,axs):
ax.imshow(im[...,0], cmap='gray', vmin=0, vmax=1.5*np.max(maps[0]))
ax.set_xticks([])
ax.set_yticks([])
if ax == axs[0]:
ax.set_title(plotpar)
if axs[0] is axes[0][0]:
axs[0].set_ylabel('Ground truth')
axs[1].set_ylabel('NLLS')
axs[2].set_ylabel('Segmented')
axs[3].set_ylabel('Bayesian')
axs[4].set_ylabel('Bayesian\nSpatial prior')
Compare distribution of parameter estimates
[6]:
fig,axes = plt.subplots(2,3,figsize=(3*4,2*3))
for par,scale,unit,plotpar,axs in zip(pars,[1e3,1e2,1e3],[r'µm$^2$/ms','%',r'µm$^2$/ms'],['D*' if par == 'Dstar' else par for par in pars],axes.T):
truemap = ivim.io.base.read_im(files_sim[par])
maps = []
for outbase in [outbase_nlls, outbase_seg, outbase_bayes, outbase_bayessp]:
maps += [ivim.io.base.read_im(outbase+f'_{par}.nii.gz')]
for par_val,ax in zip(np.unique(truemap),axs):
data = [im[truemap==par_val]*scale for im in maps]
ax.plot([0.5,len(data)+0.5],2*[par_val*scale],'--k')
ax.boxplot(data,whis=np.inf,tick_labels=['NLLS','Seg','Bayes','Bayes SP'])
if ax == axs[0]:
ax.set_title(plotpar+' ['+unit+']')
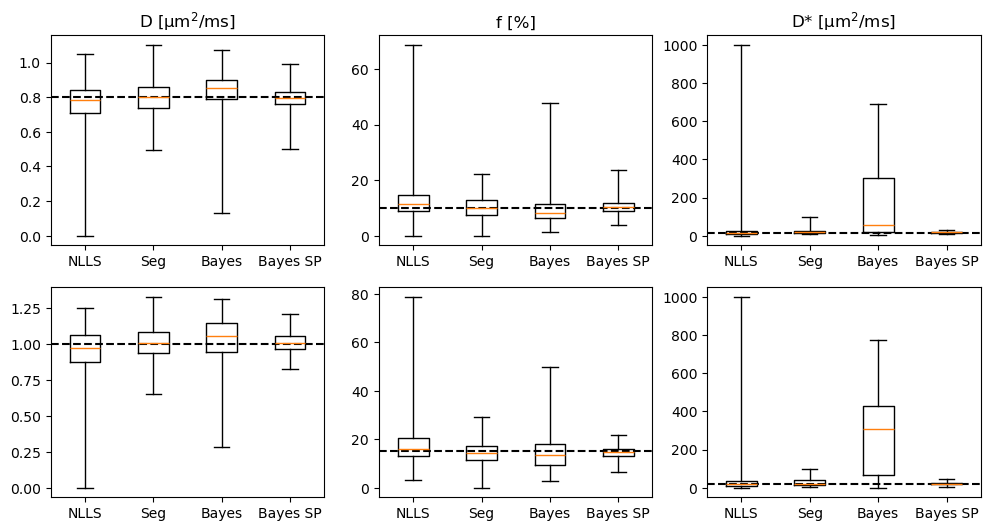
The Bayesian algorithm with spatial priors has the overall best performance with low bias and high precision for all parameters.
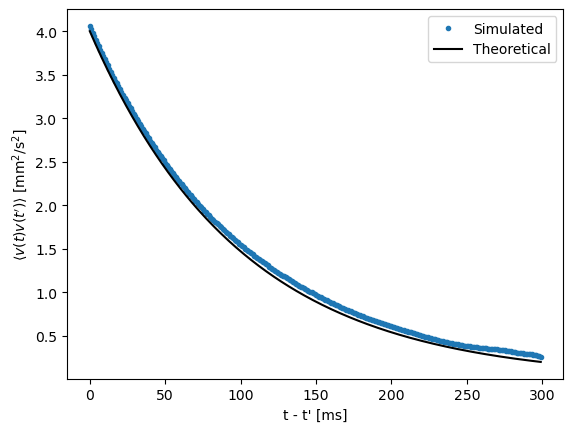
Langevin equation
Comparison of velocity autocorrelation function obtained from simulations and the theoretical one.
[7]:
sigma_v = 2e-3
tau = 100e-3
dt = 1e-3
m = 300
n = 10000
v = ivim.sim.langevin(sigma_v,tau,dt,m,n)
vacf_sim = np.zeros((m,3))
vacf_sim[0,:] = np.mean(np.var(v,axis=0),axis=0)
for i in range(1,m):
vacf_sim[i,:] = np.mean(np.mean(v[:,:-i,:]*v[:,i:,:],axis=0),axis=0)
t = np.arange(m)*dt
vacf_an = sigma_v**2 * np.exp(-t/tau)
plt.plot(t*1e3,vacf_sim[:,0]*1e6,'.',label='Simulated')
plt.plot(t*1e3,vacf_an*1e6,'k-',label='Theoretical')
plt.xlabel("t - t' [ms]")
plt.ylabel(r"$\langle v(t)v(t') \rangle$ [mm$^2$/s$^2$]")
plt.legend();
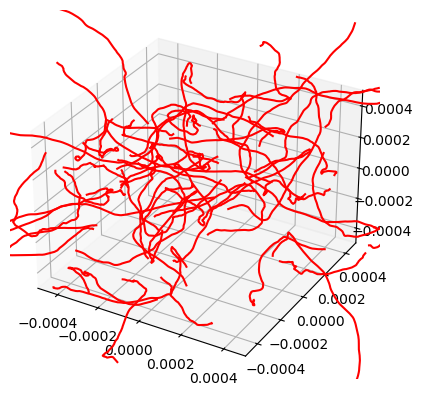
Trajectories in a 1x1x1 mm3 cube.
[8]:
walkers = 50
r = 1e-3*(np.random.rand(walkers,3)-0.5)[:,np.newaxis,:] + np.cumsum(v[:walkers,:,:],axis=1)*dt
fig,ax = plt.subplots(1,1,subplot_kw={'projection': '3d'})
for i in range(walkers):
ax.plot(r[i,:,0],r[i,:,1],r[i,:,2],'r')
ax.set_xlim([-0.5e-3,0.5e-3])
ax.set_ylim([-0.5e-3,0.5e-3])
ax.set_zlim([-0.5e-3,0.5e-3]);